题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
J1、J2、J3为(),机器人手腕的位置主要有这三个关节决定,称之为位置机构。
A.定位关节
B.定向关节
C.定姿关节
D.定态关节
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.定位关节
B.定向关节
C.定姿关节
D.定态关节
答案
 更多“J1、J2、J3为(),机器人手腕的位置主要有这三个关节决定,称之为位置机构。”相关的问题
更多“J1、J2、J3为(),机器人手腕的位置主要有这三个关节决定,称之为位置机构。”相关的问题
第1题
第2题
第3题
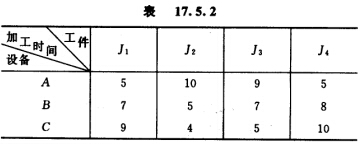
A.T1+T2+T3
B.(T1+T2+T3)/3
C.(3T1+2T2+T3)/3
D.(T1+2T2+3T3)/3
第4题
A.T1+T2+T3
B.(3×Tl+2xT2+T3)/3
C.(T1+T2+T3)/3
D.(T1+2×T2+3×T3)/3
第5题
P为可逆矩阵,若PA=B,证明:B的第j1,j2,···,jr列线性相关(或无关) A的第j1,j2,···,jr列线性相关(或无关),特别地,A与B的列向量组的极大线性无关组相互对应,A与B的秩相同。
A的第j1,j2,···,jr列线性相关(或无关),特别地,A与B的列向量组的极大线性无关组相互对应,A与B的秩相同。
第6题
A.J1,J2,J3
B.J3,J2,Jl
C.J2,Jl,J3
D.Jl,J3,J2
第8题
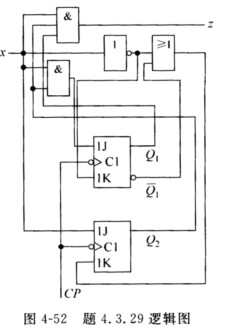
电路如图4-52所示,试列出其状态表。设初始状态Q1Q2=00,输入信号序列为001101110,试画出J1、K1、J2、K2、Q1、Q2以及z的波形。
第9题
试证明:
设E是由n个元素形成的集合.E1,E2,…,En+1是E的非空子集,则存在r,s个不同指标:
i1,i2,…,ir;j1,j2,…,js,
使得Ei1∪…∪Eir=Ej1∪…∪Ejs.
第10题
对聚合物施加一个交变应力σ=σ0cos(ωt),产生应变ε=ε1cos(ωt)+ε2sin(ωt),证明柔量的储能分量J1和损耗分量J2分别由下面两式表示
计算ωτ=0.01,0.1,0.316,1,3.16,10和100时J1E和J2E值。画出J1E和J2E对lg(ωτ)关系的草图。