题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
关于全维观测器的说法中,正确的是()。
A.其维数是所有观测器中最高的。
B.通过恰当的设计能任意配置观测器极点。
C.其维数与原系统的维数一致。
D.其作用一定比降维观测器更大。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.其维数是所有观测器中最高的。
B.通过恰当的设计能任意配置观测器极点。
C.其维数与原系统的维数一致。
D.其作用一定比降维观测器更大。
答案
 更多“关于全维观测器的说法中,正确的是()。”相关的问题
更多“关于全维观测器的说法中,正确的是()。”相关的问题
第3题
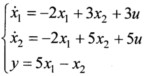
已知系统的动态方程为:
 当系统的状态不可直接量测时,问能否通过构造状态观测器来获取状态变量?若可能,试设计一个极点均位于-2处的全维状态观测器;若不可能,请说明你的理由。
当系统的状态不可直接量测时,问能否通过构造状态观测器来获取状态变量?若可能,试设计一个极点均位于-2处的全维状态观测器;若不可能,请说明你的理由。
第4题
A.CNN中的全连接层常用softmax作为激活函数。
B.CNN中的池化层用于降低特征图维数,以避免过拟合。
C.CNN由卷积层、池化层和全连接层组成,常用于处理与图像有关的问题。
D.由于卷积核的大小一般是3*3或更大,因此卷积层得到的特征图像一定比原图像小。
第5题
A.传统U2000负责整个网络的管理,包括存量网络
B.AC-WAN和AC-T分别负责IP领域和传送领域SDN网络的发放和集中控制
C.uTraffic负责整个网络的运维与保障,包括存量网络
D.NCE是管理、控制和分析融合的网络全生命周期自动化平台,聚焦业务自动化、运维自动化以及网络自治,支撑运营商实现网络云化和数字化运营转型
第6题
A.客户在华为云console可以直按管理全栈专属资源
B.部罚位置在华为云机房
C.包含两种子解决方案:源专属万南和全栈专属方案
D.华为统一增维,远程升级,业务数据物理隔离
第7题
A.减少底层兼容问题,提升开发效率
B.深入使用云上PaaS,提升云原生水平
C.统一PaaS标准,基于容器跨节点灵活部署
D.由产品使用方运维PaaS组件
第8题
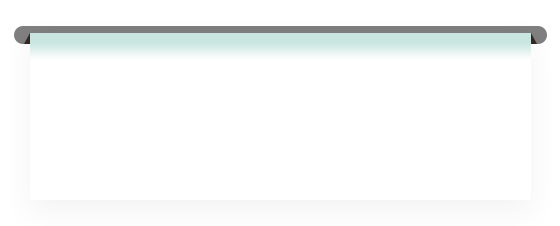
已知系统的动态方程为:
 (1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
(1)分析参数a对系统的能控性、能观性、渐近稳定性和BIBO稳定性的影响。 (2)当a=1,且系统的状态不可直接量测时,若可能,设计极点均位于-5处的最小维状态观测器。
第9题
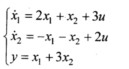
已知系统的动态方程为:
 (1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭环系统的极点位于-2±j2。 (3)当系统的状态不可直接量测时,若可能,设计极点均位于-6处的最小维状态观测器。
(1)判断系统的渐近稳定性和BIBO稳定性。 (2)若可能,设计状态反馈使闭环系统的极点位于-2±j2。 (3)当系统的状态不可直接量测时,若可能,设计极点均位于-6处的最小维状态观测器。
第10题
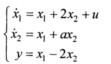
已知系统的动态方程为:
 (1)判断系统的稳定性(渐近稳定、BIBO稳定)。 (2)若有可能,设计状态反馈,使系统的两个闭环极点均位于-2。 (3)若有可能,设计极点位于-8处的最小维状态观测器。 (4)用(3)题得到的观测状态来实现(2)题的状态反馈,写出复合系统的(增广的)状态空间方程。
(1)判断系统的稳定性(渐近稳定、BIBO稳定)。 (2)若有可能,设计状态反馈,使系统的两个闭环极点均位于-2。 (3)若有可能,设计极点位于-8处的最小维状态观测器。 (4)用(3)题得到的观测状态来实现(2)题的状态反馈,写出复合系统的(增广的)状态空间方程。