题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知比例一微分控制系统如图4-59所示。 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
已知比例一微分控制系统如图4-59所示。
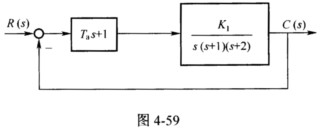 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
已知比例一微分控制系统如图4-59所示。
试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。
答案
 更多“已知比例一微分控制系统如图4-59所示。 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。”相关的问题
更多“已知比例一微分控制系统如图4-59所示。 试绘制K1与Ta(K1≥0,Ta≥0)同时变化时的根轨迹图。”相关的问题
第1题
设高速列车停车控制系统如图3-56所示。
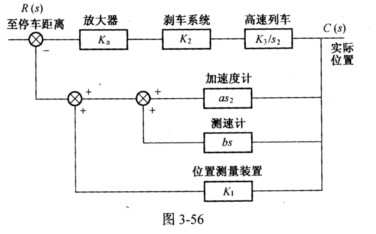 已知参数:K1=1,K2=1000,K3=0.001,a=0.1,b=0.1。试证:当放大器增益K取任何正值时,系统都是稳定的。
已知参数:K1=1,K2=1000,K3=0.001,a=0.1,b=0.1。试证:当放大器增益K取任何正值时,系统都是稳定的。
第2题
已知控制系统的结构图如图3.63所示。
 试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
试求: (1)当主反馈开路时,系统的单位阶跃响应为:0.5e-t+0.5e-2t,计算G1(s)。 (2)当
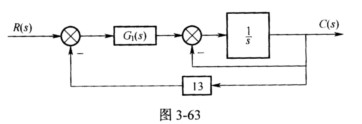 ,且r(t)=10.l(t)时,求tp、σp、ess。
,且r(t)=10.l(t)时,求tp、σp、ess。
第3题
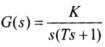
已知控制系统结构图如图5-74所示。
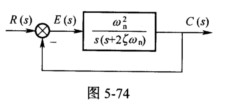 当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
当输入r(t)=2 sint时,系统的稳态输出Cs(t)=4sin(t-45°)。试确定系统的参数ζ、ωn。
第4题
一温度控制系统,要求控制精度较高,控制规律应该为()。
A.比例控制、较弱的积分控制、较强的微分控制
B.比例控制、较强的积分控制、较弱的微分控制
C.比例控制、较弱的积分控制、较弱的微分控制
D.比例控制、较强的积分控制、较强的微分控制
第5题
(中国科学院一中国科学技术大学2003年硕士研究生入学考试试题)控制系统方块图如图3-43所示。
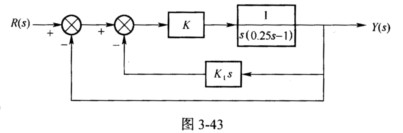 (1)确定使闭环系统稳定的参数KKt的取值范围。 (2)若要求:①系统的最大超调量为10%;②调整时间为1.5秒(对于5%的误差范围)。 试确定参数K和Kt的值。
(1)确定使闭环系统稳定的参数KKt的取值范围。 (2)若要求:①系统的最大超调量为10%;②调整时间为1.5秒(对于5%的误差范围)。 试确定参数K和Kt的值。
第6题
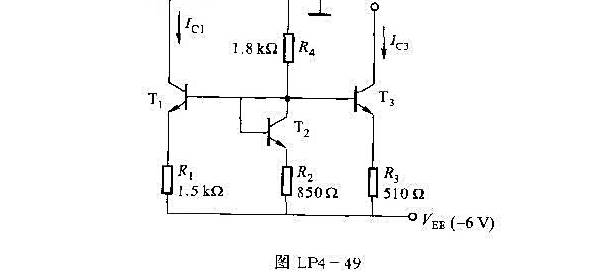
,试求IC1、IC3和T3侧的输出交流电阻Rs3.

第7题
系统结构如图3.62所示,
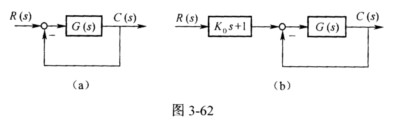 ,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
第8题
已知控制系统结构如图3-54所示。
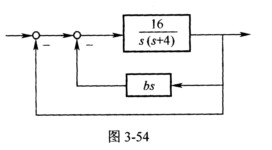 (1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
(1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
第9题
具有饱和非线特性的非线性控制系统如图8-17所示,若r(t)=0,试在e一
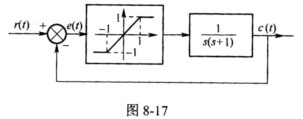 平面上绘制e(0)=2,
平面上绘制e(0)=2,
 (0)=0时的相轨迹图(要求将解题过程写清楚)。
(0)=0时的相轨迹图(要求将解题过程写清楚)。

第10题
(中国科学院一中国科学技术大学2006年硕士研究生入学考试试题)反馈控制系统如图3.39所示。
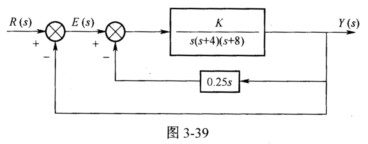 (1)确定使系统一对复根的阻尼比ζ=0.707时的K值。 (2)在(1)条件下,求出系统的闭环极点。 (3)在(1)确定的K值下,求系统在单位斜坡输入信号作用下的稳态误差。
(1)确定使系统一对复根的阻尼比ζ=0.707时的K值。 (2)在(1)条件下,求出系统的闭环极点。 (3)在(1)确定的K值下,求系统在单位斜坡输入信号作用下的稳态误差。