题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
若某串联校正装置的传递函数为,则该校正装置属于()。
A.超前校正
B.滞后校正
C.滞后-超前校正
D.不能判断
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.超前校正
B.滞后校正
C.滞后-超前校正
D.不能判断
答案
 更多“若某串联校正装置的传递函数为,则该校正装置属于()。”相关的问题
更多“若某串联校正装置的传递函数为,则该校正装置属于()。”相关的问题
第2题
已知单位反馈系统的开环传递函数为
置,使校正后的系统相位裕量γ≥30°,增益穿越频率ωc≥45,静态速度误差系数Kv≥100。
第3题
已知单位反馈系统的开环传递函数为
第4题
已知单位反馈系统的开环传递函数为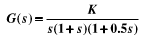 ,试设计串联校正装置,使校正后 的系统相位裕量γ≥40°,增益裕量
,试设计串联校正装置,使校正后 的系统相位裕量γ≥40°,增益裕量 ,静态速度误差系数
,静态速度误差系数 。
。
第5题
如图所示,最小相位系统的开环对数幅频曲线为L0(ω),串联校正装置对数幅频曲线为Lc(ω)。
(1) 求未校正系统开环传递函数G0(s)及串联校正装置传递函数Gc(s)。
(2) 在图中画出校正后系统的开环对数幅频曲线L(ω),并求出校正后系统的相位裕量γ。
第6题
已知单位反馈系统的开环传递函数为
第7题
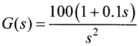
试求: (1)已知一最小相位系统开环的对数幅频特性如图5-69所示。试写出系统开环传递函数G(s),计算相位裕量γ和增益裕量h。 (2)若系统原有的开环传递函数为
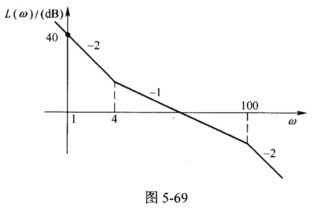 ,而校正后的对数幅频特性如图5-69所示,求串联校正装置的传递函数。
,而校正后的对数幅频特性如图5-69所示,求串联校正装置的传递函数。
第8题
已知单位反馈系统的开环传递函数 ,试设计串联滞后校正装置,使校正后系统的相位裕量γ≥40°,静态速度误差系数Kv≥5。
,试设计串联滞后校正装置,使校正后系统的相位裕量γ≥40°,静态速度误差系数Kv≥5。
第9题
设一单位反馈系统的开环传递函数为
第10题
已知单位反馈系统的开环传递函数为
超前校正装置,使校正后系统具有相位裕量γ≥40°,增益穿越频率ωc=20,静态速度误差系数Kv≥100。
第11题
设某系统的开环传递函数为