题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g
设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g
设 R[t]为t的实系数多项式的集合,![设 R[t]为t的实系数多项式的集合,为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],](https://img2.soutiyun.com/ask/2021-02-23/982943323474961.png) 为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g2(t).求f(R0[1]).f-1({t2+2t+1}).f-1(f({t-1,t2-1})).
为t的n次实系数多项式的集合.定义函数f:R[t]→R[t],f(g(t))=g2(t).求f(R0[1]).f-1({t2+2t+1}).f-1(f({t-1,t2-1})).
 答案
答案
查看答案

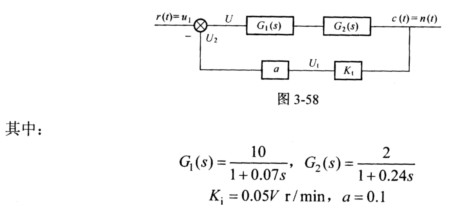 设系统误差从系统输入端定义,为系统输入量的实际值与希望值之差。试求: (1)动态误差系数C0、C1和C2。 (2)r(t)=l(t)时输出端稳态误差。 (3)r(t)=l(t)时输入端稳态误差
设系统误差从系统输入端定义,为系统输入量的实际值与希望值之差。试求: (1)动态误差系数C0、C1和C2。 (2)r(t)=l(t)时输出端稳态误差。 (3)r(t)=l(t)时输入端稳态误差
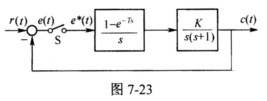 其中T=0.1s,K=1,试求静态误差系数Kp、Kv、Ka,并求系统在r(t)=t作用下的稳态误差e*(∞)。
其中T=0.1s,K=1,试求静态误差系数Kp、Kv、Ka,并求系统在r(t)=t作用下的稳态误差e*(∞)。 是n维实向量,且
是n维实向量,且
 ,p≥1试证:
,p≥1试证: =C(C为常数)
=C(C为常数) (r(t),r(t))=0.
(r(t),r(t))=0.