题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
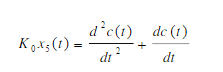
设系统的微分方程式为。 已知r(t)=(t),c(0)=c'(0)=0,求系统的输出响应。
设系统的微分方程式为

 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
设系统的微分方程式为
答案
 更多“设系统的微分方程式为。 已知r(t)=(t),c(0)=c'(0)=0,求系统的输出响应。”相关的问题
更多“设系统的微分方程式为。 已知r(t)=(t),c(0)=c'(0)=0,求系统的输出响应。”相关的问题
第1题
设系统的微分方程式为
第2题



第3题
已知调速系统如图3-58所示。
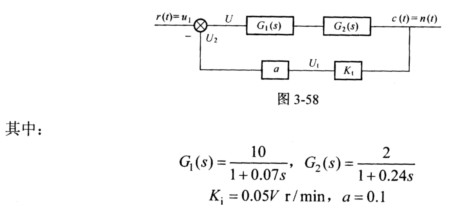 设系统误差从系统输入端定义,为系统输入量的实际值与希望值之差。试求: (1)动态误差系数C0、C1和C2。 (2)r(t)=l(t)时输出端稳态误差。 (3)r(t)=l(t)时输入端稳态误差
设系统误差从系统输入端定义,为系统输入量的实际值与希望值之差。试求: (1)动态误差系数C0、C1和C2。 (2)r(t)=l(t)时输出端稳态误差。 (3)r(t)=l(t)时输入端稳态误差
第4题
设已知描述某控制系统的运动方程组如下
x1(t)=r(t)-C(t)+n1(t) (1)
x2(t)=K1x1(t) (2)
x3(t)=x2(t)-x5(t) (3)
 (4)
(4)
x5(t)=x4(t)-K2n2(t) (5)
 (6)
(6)
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
第5题
系统微分方程组如下:
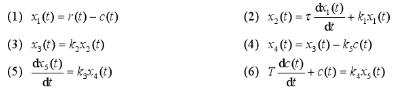
式中,τ、T、k1~k5均为常数。试建立以r(t)为输入、c(t)为输出的系统动态结构图,并求系统的传递函数C(s)/R(s)。
第6题
设f(x),g(x)为任意两个不含非负整根的代数多项式,试证函数
第7题
系统的微分方程组如下:

其中,K0,K1,K2,T均为正常数。试建立系统结构图,并求出传递函数C(s)/R(s),C(s)/N1(s),C(s)/N2(s)。
第8题
第9题
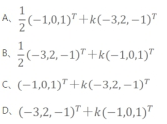
设3元线性方程组AX=B,已知R(A)=r(A,b)=2,其两个解a,b满足a+b=(-1,0,1)T,a-b=(-3,2,-1)T,k为任意常数则方程组的通解为()。
A.1/2(-1,0,1)T+k(-3,2,-1)T
B.1/2(-3,2,-1)T+k(-1,0,1)T
C.(-1,0,1)T+k(-3,2,-1)T
D.(-3,2,-1)T +k(-1,0,1)T
第10题
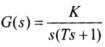
系统结构如图3.62所示,
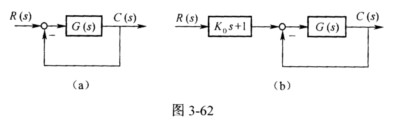 ,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。
,定义误差e(t)=r(t)-c(t)。 试求: (1)若希望图3-62(a)中系统所有的特征根位于s平面上s=-2的左侧,且阻尼比为0.5,求满足条件的K,T的取值范围。 (2)求图3-62(a)系统的单位斜坡输入下的稳态误差。 (3)为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图3-62(b)所示,试求出合适的K0值。