题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
系统微分方程组如下: (1)x1(t)=r(t)-c(t) (2) (3)x3(t)=k2x2(t) (4)x4(t)=x3(t)-k5c(t) (5) (6) 式
系统微分方程组如下:
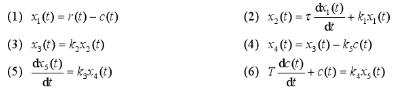
式中,τ、T、k1~k5均为常数。试建立以r(t)为输入、c(t)为输出的系统动态结构图,并求系统的传递函数C(s)/R(s)。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
系统微分方程组如下:
式中,τ、T、k1~k5均为常数。试建立以r(t)为输入、c(t)为输出的系统动态结构图,并求系统的传递函数C(s)/R(s)。
答案
 更多“系统微分方程组如下: (1)x1(t)=r(t)-c(t) (2) (3)x3(t)=k2x2(t) (4)x4(t)=x3(t)-k5c(t) (5) (6) 式”相关的问题
更多“系统微分方程组如下: (1)x1(t)=r(t)-c(t) (2) (3)x3(t)=k2x2(t) (4)x4(t)=x3(t)-k5c(t) (5) (6) 式”相关的问题
第1题
系统的微分方程组如下:

其中,K0,K1,K2,T均为正常数。试建立系统结构图,并求出传递函数C(s)/R(s),C(s)/N1(s),C(s)/N2(s)。
第2题
设已知描述某控制系统的运动方程组如下
x1(t)=r(t)-C(t)+n1(t) (1)
x2(t)=K1x1(t) (2)
x3(t)=x2(t)-x5(t) (3)
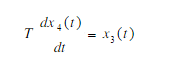 (4)
(4)
x5(t)=x4(t)-K2n2(t) (5)
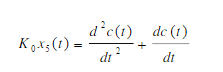 (6)
(6)
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
第4题
试证非齐次线性微分方程组的叠加原理:设x1(t),x2(t)分别是方程组

的解,则x(t)=x1(t)+x2(t)是方程组
第5题
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数
X1(s)=R(s)G1(s)[G1(s)-G7(s)]G8(s)]C(s)
X2(s)=G2(s)[x1(s)-G6(s)X3(s)]
X3(s)=[X2(s)-C(s)G5(s)]G3(s)
C(s)=G4(s)x3(s)
第6题
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数C(s)/R(s)。
X1(s)=R(s)G1(s)[G1(s)-G7(s)]G8(s)]C(s)
X2(s)=G2(s)[x1(s)-G6(s)X3(s)]
X3(s)=[X2(s)-C(s)G5(s)]G3(s)
C(s)=G4(s)x3(s)
第9题
设变量b可用变量a1,a2,…,an的1次式表示:a1x1+a2x2+…+anxn=b.为了确定其中的系数x1,x2,…,xn给出a1,a2,…,an,b的m组测量值ai1,ai2,…,ain,bi(i=1,2,…m).于是,只要求出联立1次方程组
ai1x1+ai2x2+…+ainxn=bi(i=1,2,…,m) (6-28)的解x1,x2,…,xn就可以了.但由于测量的误差及通常情况下m>n,此时方程组(6-28)-般无解.这时,对于方程组(6-28)的最理想的x1,x2,…,xn的值,是取使得在各点处偏差
ai1x1+ai2x2+…+ainxn-bi(i=1,2,…,m)的平方和

达到最小的x1,x2,…,xn.由微分学知道,这样的x1,x2,…,xn一定满足 (j=1,2,…,n),即满足
(j=1,2,…,n),即满足

现在记矩阵A=(aij)m×n,列向量b=(b1,b2,…,bm)T,x=(x1,x2,…,xn)T.
第10题
设φi(x1,x2,…,xn)=Ci(i=1,2,…,n-1)是方程组
第11题
某二阶LTI连续系统的初始状态为x1(0)和x2(0),已知当x1(0)=1、x2(0)时,其零输入响应为Y1zi=e-t+e-2t(t≥0);当x1(0)=0、x2(0)=1时,其零输入响应为Y2zi=e-t-e-2t(t≥0);当x1(0)=0、x2(0)=-1,输入为x(t)时,其全响应为y(t)=2+e-t(t≥O)。求当x1(0)=3、x2(0)=2,输入为2x(t)时系统的全响应。