题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
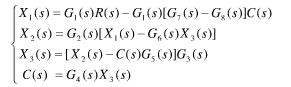
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数。 X1(s)=R(s)G1(s)[G1(s)-G7
已知系统的微分方程组的拉普拉斯变换式,试画出系统的动态结构图并求出传递函数C(s)/R(s)。
X1(s)=R(s)G1(s)[G1(s)-G7(s)]G8(s)]C(s)
X2(s)=G2(s)[x1(s)-G6(s)X3(s)]
X3(s)=[X2(s)-C(s)G5(s)]G3(s)
C(s)=G4(s)x3(s)
 答案
答案
查看答案

 。
。

 (4)
(4) (6)
(6) 。
。