题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
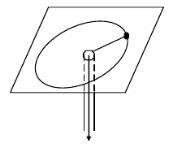
一质点在惯性系K中作匀速圆周运动,轨迹方程为x2+y2=a2,z=0,在以速度V相对于K系沿x方向运动的惯性系K'中观测,该质点的轨迹若何?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“一质点在惯性系K中作匀速圆周运动,轨迹方程为x2+y2=a2,z=0,在以速度V相对于K系沿x方向运动的惯性系K'中观测,该质点的轨迹若何?”相关的问题
更多“一质点在惯性系K中作匀速圆周运动,轨迹方程为x2+y2=a2,z=0,在以速度V相对于K系沿x方向运动的惯性系K'中观测,该质点的轨迹若何?”相关的问题
第1题
如图所示,在一根穿过竖直管的轻绳的一端系一小球,开始时小球在水平面内作半径为r1的匀速圆周运动,然后向下拉绳子,使小球的运动轨道半径缩小为r2,则此时小球具有的动能与小球原有的动能之比为
第3题
一质点在力场F作用下由点A(2,2,1)沿直线移动到点B(4,4,2),求F所做的功。已知F的方向指向坐标原点,其大小与作用点到xOy平面的距离成反比
第5题
有两个沿x轴作谐振动的质点,它们的频率γ,振幅A都相同,当第一个质点自平衡位置向负向运动时,第二个质点在 处向负向运动,则两者的相差△φ为______。
处向负向运动,则两者的相差△φ为______。

第6题
(中国科学院一中国科学技术大学2005年硕士研究生入学考试试题)设单位负反馈系统的根轨迹图如图4-36所示。
 (1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
(1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
第8题
(中国科学院一中国科学技术大学2006年硕士研究生入学考试试题)反馈控制系统如图所示。取
 。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
第9题
三阶系统的模拟
一、实验目的
1.在电子模拟器上建立数学模型方法。
2.三阶系统的阶跃响应性能指标超调量σ%与系统开环增益K的关系。
二、实验内容
1.模拟器上排出系统的模拟运算电路。
2.按阶跃响应的不同指标:σ%=5%、σ%=50%和临界稳定调整并确定相应的开环增益K值。
三、实验准备的主要内容
1.计算σ%=5%、σ%=50%及临界稳定时系统相应开环增益K值。
提示:先做出系统的根轨迹,再由σ%→ξ→arccosξ=β→K;由根轨迹与虚轴交点确定临界增益
2.由给定的系统结构图,自行设计系统的模拟运算电路图。
根据结构图给定的参数及计算出的开环增益K,选配模拟运算电路的参数R及C(见下表)。
| 技术指标 | 开环增益 | 临界增益 | 运算放大器的R、C之值 |
| σ%=5% | |||
| σ%=50% |
四、实验设备
电子模拟器一台
慢扫描示波器一台
双线笔录仪一台(非必备仪器)
元器件接插件若干个
第11题
 证明:点
证明:点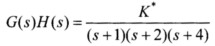 在根轨迹上,并求出相应的根轨迹增益K*和开环增益K。
在根轨迹上,并求出相应的根轨迹增益K*和开环增益K。