题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
线性2自由度汽车在转向盘角阶跃输入下的稳态横摆角速度增益为多少?
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
答案
 更多“线性2自由度汽车在转向盘角阶跃输入下的稳态横摆角速度增益为多少?”相关的问题
更多“线性2自由度汽车在转向盘角阶跃输入下的稳态横摆角速度增益为多少?”相关的问题
第1题
对线性定常的单输入-单输出系统
 (1)若A非奇异,证明:系统在零初态条件下的单位阶跃响应是: y(t)=cA-1(eAt-1)b (2)从能控性判据出发,证明:若系统能控,则对任意的实数λ,增广矩阵
(1)若A非奇异,证明:系统在零初态条件下的单位阶跃响应是: y(t)=cA-1(eAt-1)b (2)从能控性判据出发,证明:若系统能控,则对任意的实数λ,增广矩阵
 一定满秩。
一定满秩。
第3题
已知系统的动态方程为:
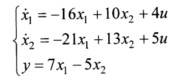 求初态为x1(0)=2,x2(0)=3时,系统在单位阶跃输入作用下: (1)系统的状态响应表达式。 (2)求系统输出范数最小的时刻t。 (3)写出系统的传递函数。
求初态为x1(0)=2,x2(0)=3时,系统在单位阶跃输入作用下: (1)系统的状态响应表达式。 (2)求系统输出范数最小的时刻t。 (3)写出系统的传递函数。
第4题
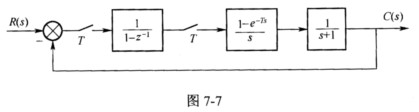
已知采样系统的结构如图7-7所示,采样周期T=1s。
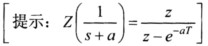 (1)判断系统的稳定性。 (2)求系统在单位阶跃输入下的稳态误差e(∞)。
(1)判断系统的稳定性。 (2)求系统在单位阶跃输入下的稳态误差e(∞)。
第6题
已知闭环传递函数的一般形式为:
 误差定义为e(t)=r(t)-c(t)。试证: (1)系统在阶跃信号输入下,稳态误差为零的充分条件为:
误差定义为e(t)=r(t)-c(t)。试证: (1)系统在阶跃信号输入下,稳态误差为零的充分条件为:
 (2)系统在斜坡信号输入下,稳态误差为零的充分条件为:
(2)系统在斜坡信号输入下,稳态误差为零的充分条件为:
 (3)推导系统在斜坡信号输入下稳态误差为零的充分条件。 (4)指出系统闭环传递函数与系统型别之间的关系。
(3)推导系统在斜坡信号输入下稳态误差为零的充分条件。 (4)指出系统闭环传递函数与系统型别之间的关系。
第7题
某单输入线性定常系统(也叫线性非时变系统)的状态方程是
 ,已知: (1)当x(0)=
,已知: (1)当x(0)=
 时,系统的零输入响应为x(t)=e-t(0)。 (2)当x(0)=
时,系统的零输入响应为x(t)=e-t(0)。 (2)当x(0)=
 时,系统的零输入响应为x(t)=e-2t(0)。 (3)系统的零状态单位阶跃响应为x(t)=
时,系统的零输入响应为x(t)=e-2t(0)。 (3)系统的零状态单位阶跃响应为x(t)=
 。 求: (1)试确定A和b。 (2)以T=ln2为采样周期,求系统离散化的状态方程。
。 求: (1)试确定A和b。 (2)以T=ln2为采样周期,求系统离散化的状态方程。
第8题
系统的动态结构图如图3-57所示,要求输入r(t)单位阶跃时,超调量σ=20%,峰值时间tp=1s。
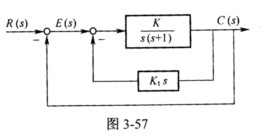 试求: (1)试确定K和Kt的值。 (2)在所确定的K和Kt值下,当输入r(t)单位阶跃时,系统的稳态误差是多少?
试求: (1)试确定K和Kt的值。 (2)在所确定的K和Kt值下,当输入r(t)单位阶跃时,系统的稳态误差是多少?
第9题
已知控制系统结构如图3-54所示。
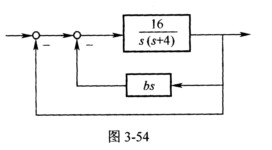 (1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。
(1)当b=0时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比为0.8时的速度反馈常数b的值,并确定在单位阶跃输入下系统的最大超调量和单位斜坡输入所引起的稳态误差。 (3)怎样使(2)的阻尼比保持0.8不变而使其稳态误差等于(1)的稳态误差值。